



 ★複雑な形を削り出す世界最高峰のマシン 森精機製作所凄すぎワロタww
★複雑な形を削り出す世界最高峰のマシン 森精機製作所凄すぎワロタww従来比100倍のスピードの回転駆動を持ち高精度と作業性を両立した世界最高峰5軸制御マシニングセンタ、日本から発売!森精機が2940万円で販売中のNMV5000DCGという機械の映像です。複雑な形をしたインペラという羽根車を削り出しているムービーなんですが、ワクワクしちゃうよね!こういう技術系動画って楽しいよね!
 ★驚くべき精度で飛行する4ローターの自律式ヘリコプターが凄いぞっと。
★驚くべき精度で飛行する4ローターの自律式ヘリコプターが凄いぞっと。アメリカのペンシルベニア大学で研究されている自律式ヘリコプターの映像です。動きがとてもシャープっすねー。そしてその飛行精度がマジで凄いです。様々角度に設置された小さな窓をいとも簡単に通過します。これはスパイや諜報活動に使われるのかしら?それとも新しい無人兵器に利用されるのかしら。
 ★はええええええええええええええ!最近のロボコン凄すぎワロタwwwww
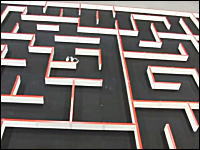
★はええええええええええええええ!最近のロボコン凄すぎワロタwwwww小型ロボットに迷路を探索させて最短の道を探させ、ゴールまでのタイムを競う競技があるそうなんです。最短距離を見つけ出し最適なスピードを計算して壁に当たることなくクリクリと動くミニロボットが凄すぎたので紹介します。このロボットは既に探索走行を終えている状態なので、最短経路を知ったうえでのタイムトライアルです。
MicroMouse at Chubu meeting 2009/12/20















")







))イオンモール爆発を近距離から撮影した動画が公開される。")




))")



))")










")

")

")
")
のトラックに侵入した子供がはねられてしまう事故。")


を助けてあげたGJ動画。")

")
w")
")
")


))")







")

))")


")

))")













))")





))")





))")



w")









これが最近のミニ四駆かー
斜めに走るとは思わなかった!
最初のは道を覚えさしたって事?
>>3
道を探してるとこ
スピードとタイヤのグリップを計算したコーナリングしてるのかな??
すごすぎて笑える
スロー再生だとタイヤ滑ってるね。
これマジなの?
ゴールがどこなのか、どうやって識別してるんだろ
すげーwこういうの創りたいわw
んー 凄い。私も高校生の頃(約20年前)マイクロマウスなどを作って文化祭に出してたんだけど
その頃とは 比べ物にならないですね(@_@;)
どんな制御してるんだろう。
すげー
1回壁にぶつかってるのに複雑な曲線を
曲がりきれるのか。
グリップ計算してもずっと一定なわけないし、無理なんじゃ
プロジェクトDも納得のはしりだなw
衛星とリンクしてるんだきっと
コンピューターにしたら
最後のスローモーションよりも遥かに
ゆっくりと世界が動くわけだから
意外と制御は簡単なんじゃないかな。
なんちゃって
ステッピングモータの時代が懐かしい。
面白い!!( ^ω^)
こういう玩具あったら多少高くても衝動買いしちゃいそう・・・
それはそうと途中ちょっとぶつかったのがかわいいw
マイクロマウスはやってないけど、
ロボット関係はやってる俺がちょっと補足?する
センサーで壁が近くにあるかどうかを調べて、左右のモーターに反映させてるんだと思う。
ちなみにアルゴリズムとかワケワカメなのであんまり詳しく説明できない
ゴールはコースの真ん中の広いとこがゴールだったと。
↑
もしかして新手のギャグですか・・ww ?
つっこんでいいものやら
あだちほう
迷路が直線で有ることを前提にすることが出来て、なおかつ曲がり角のサイズが一定だと分かっていたら、壁までの単位距離(道幅=曲がり角の時の入り口の大きさ)がわかっていれば、
開始場所から次の壁までの単位距離を計測してつなげていけば、内部では格子上のメモリに迷路の経路を補完できる。
ゴールまでの経路はまぁ探索方法は色々あるからどれでもいいとして、移動経路を計算できたら単位距離が1の区間への侵入と退出は斜め移動が可能と判断すればいい。
それよりも経路通りに移動できるだけの制御が凄い。
ソフトウェア的なアルゴリズムはそこまで難しくないと思うけど、それを制御する部分と、その制御に答えられるセンサーの精度が凄い。
そのうちF1とかやりだしたらすごそう
何が凄いかって制御の事はよくわかんないけど、ピロリリンって確認するのがいいw
机上の計算はできるが、横滑り分の補正はどうするんだろう?
F1レーサーなど要らん
どれくらいの重さなんだろうな。さすがに重さが増すと制御大変になるだろうし
>>24
そう言う意味では、補正はしてない。
っというか常に補正していると書いたほうがいいか。(アナロゲ的に)